
紀元前よりもっとも一般的な位置の計測方法として用いられてきた三角測量法は、図1に示すように、三角形が1つの辺(基線)の長さd)とその辺の両端の角の大きさ(α、β)により決定されるという三角形の決定条件に基づいています。この三角測量法の原理を、図2に示すように、ステレオ画像に当てはめることにより対象物の位置を決定する方法がステレオ画像法です。三角測量法で基線の両端の角α、βを測定するために測角儀が置かれた点A、Bに2台のカメラを置き、対象物を撮影し、角α、βを測る代わりに、画像上の対象物の位置を計測することにより、対象物Pの位置を決定します。
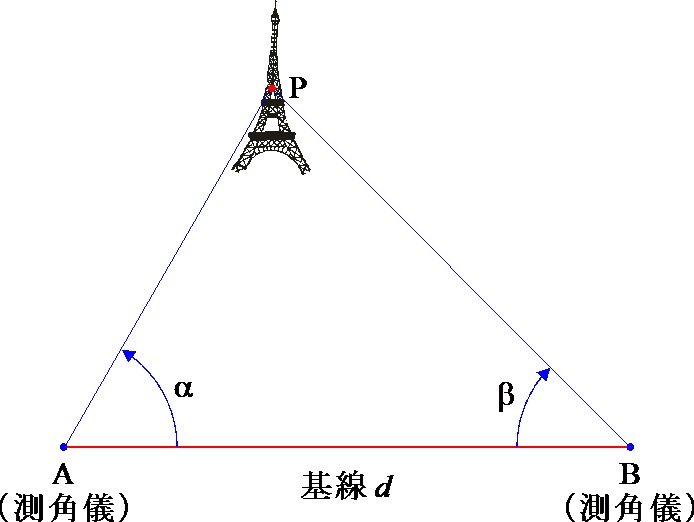 図1 三角測量法
図1 三角測量法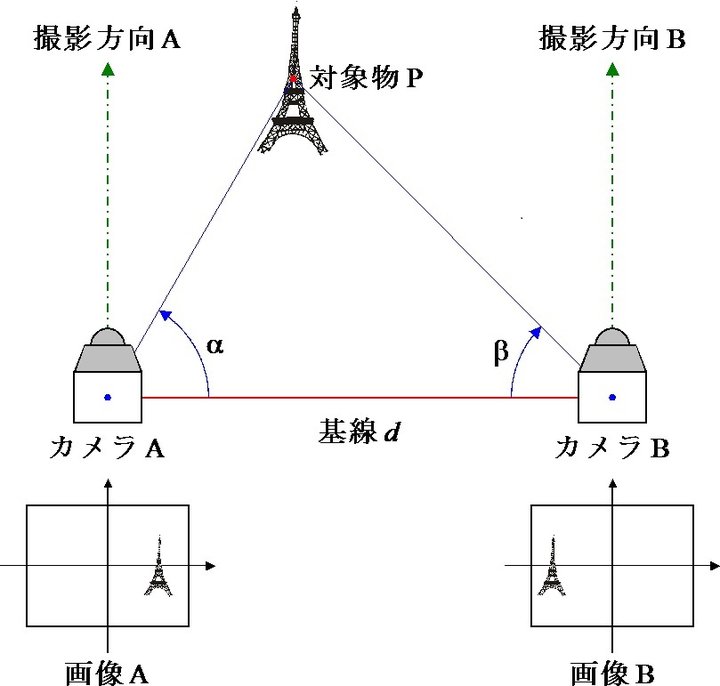 図2 ステレオ画像法
図2 ステレオ画像法ステレオ画像法は、計測対象に対して何の影響も与えず、対象の制限がないことや、画像データが取得可能な環境ならば適用できるので汎用性が高いことなどの長所があります。しかし、左右の画像上でのステレオ対応点の探索(画像マッチング)において、誤対応(ミスマッチング)が発生することがある、オクルージョン(occlusion)と呼ばれる対象物が片方の画像に撮影されていない状況を発見できないことがある、計算時間がかかるなどといった大きな問題点が未だ完全には解決されていません。
ステレオ画像法は、写真測量分野で地形図作成に用いられたり、画像処理分野でロボットの視覚(ロボットビジョンと呼ばれています)に用いられたりしています。また、自動車の衝突防止技術には、ステレオ画像法を用いているものもあります。
(2015年11月18日 初稿)