
海洋無人機(Unmanned Maritime Vehicle UMV)は、海中を潜航できる「無人潜水機(Unmanned Underwater Vehicle UUV)」と海面上を航行する「無人水上機(Unmanned Surface Vehicle USV)」に大別されます。
無人潜水機は①母船に曳航される「曳航型(Tow Fish)」、②母船もしくは基地局からケーブル等操作する「遠隔操作型ROV(Remotely Operated Vehicle)」、③遠隔操作を必要としない「自律型AUV (Autonomous Underwater Vehicle)」に分類され、人が操作せずに全自動で行動するAUVは海中ロボットとも称されています。
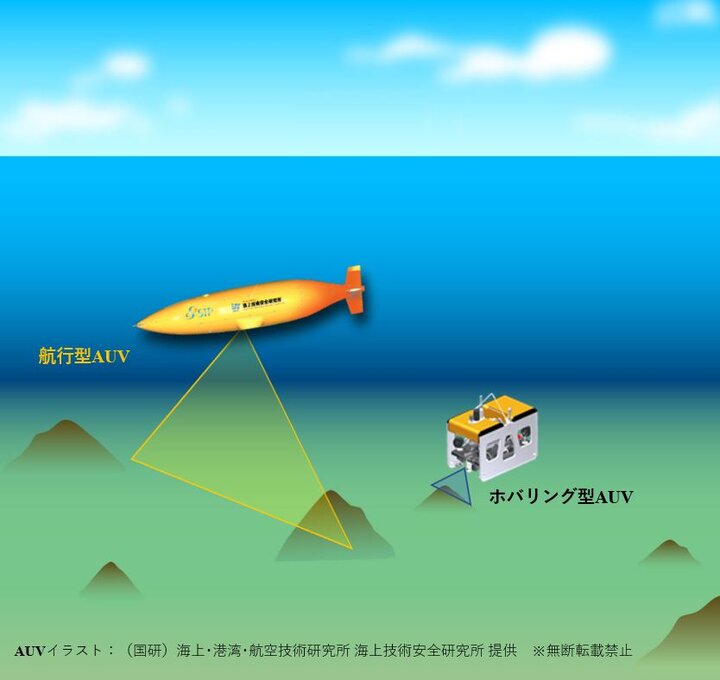
AUVは、形状、機能から次表に示す3種類のAUVが実用化されています。
| 種類 | 主な特徴等 |
|---|---|
| 航行型 | 多くは流線型の形状であり、消費電力を抑えた高速移動により、長距離航行できるように工夫されています。主な用途には、広範囲の海底地形探査やパイプライン検査等が挙げられます。 |
| ホバリング型 | 航行型よりもスラスタ*数を多く持ち、定点保持やその場回頭 、低速移動など、より自由度の高い運動特性を有しています。このため、主な用途には、特定箇所における重点的な調査が挙げられます。 |
| グライダ型 | スラスタ*を持たず、重心位置を変更することにより上昇・下降などを行います。特徴としては、無音であること、消費電力が少ない点が挙げられ、航行型よりも長期・広域の稼働が可能となります。主には、長期の海洋環境調査、海中の生物調査などに用いられています。 |
また、近年の研究事例では、専用母船が必要ない小型のAUVに音響探査システムを搭載し、熱水鉱床のような火山活動に伴うチムニーや小規模なマウンド地形等の特徴的地形を効率的に探査する技術が開発されています。
このため、国では、基幹的な海洋開発産業の一つとなっていく海洋石油・ガス開発・生産施設および洋上風力発電施設など海洋資源開発への活用を想定し、「AUVの安全運用ガイドライン(令和3年3月)」を策定しています。
さらには、地球上のフロンティア領域ともいえる海洋空間においては、人命のリスクを最小限に抑えて活動できるAUVの活躍が、海洋開発産業の基盤となる安全の確保だけなく、漁業や養殖といった水産業への活用、海洋環境の調査、さらに、将来的には海洋観光産業などの創出につながることも期待されています。
[参考文献]
・写真測量とリモートセンシング「4. 高精細3D音響画像による海底資源探査」
松田 健也, 浅田 昭, 小島 光博, 斎藤 悠太 2017 年 56 巻 6 号 p. 295-298
・「AUVの安全運用ガイドライン」 国土交通省 海事局 2022年3月
[資料提供]
国立研究開発法人 海上・港湾・航空技術研究所 海上技術安全研究所
(2025年1月20日 初稿)