
光波測距儀が実用化されるまでは、トランシットによる測角の精度に相当する測距の精度を達成することは非常に困難でした。特に測点間が長距離で途中の地形が複雑である場合の測距で十分な精度を確保することはほとんど不可能でした。一方、トランシットによる測角は比較的容易にできました。
そのため、距離を測定するのは原理的には唯一つの辺についてであり、もっぱら三角形の内角を測定するだけで、三角網を形成するすべての測点の位置を精密に決めることができる三角測量が、広い区域内に骨格となる点を配置し、その位置を正確に決めるためには、極めて便利な方法として広く用いられました。
三角測量の作業手順は概ね以下のとおりです。
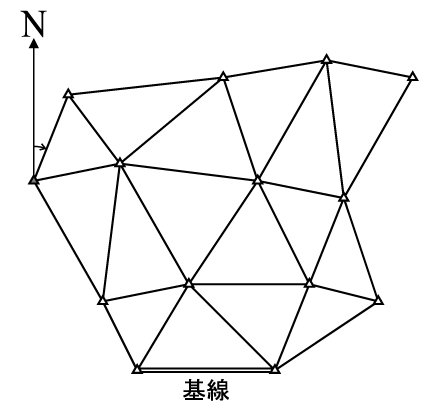
① 下図に示すように、まず適当な間隔をおいて配置された測点を直線で結んで多数の三角形からなる三角網をつくります。
② 三角網の大きさを決めるため、これらの三角形中のどれか1つの辺(基線)の長さを測定します。
③ 三角網の形を決めるため、すべての三角形の内角を測定します。
④ 座標系における三角網の位置と方向を固定するため、1点1方位(1つの測点の座標と、その点より他の測点に至る辺の方位角)を与えます。
⑤ すべての測点の水平位置を最小2乗法による調整計算により決定します。なお、三角測量で水平位置が定められた測点は三角点と呼ばれています。
光波測距儀が実用化され、トランシットによる測角の精度以上の測距の精度を、トランシットの観測より容易な観測で達成できるようになったため、三辺測量やトラバース測量が三角測量に取って代わりました。
(2015年11月18日 初稿)