
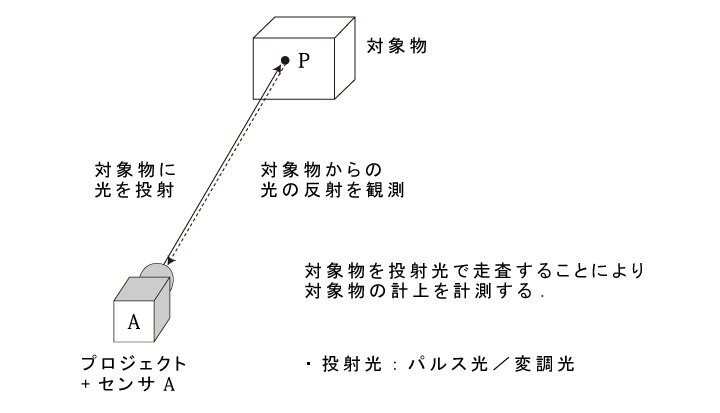
 図1 光レーダ法
図1 光レーダ法光レーダ法には、以下に示す飛行時間法と位相差法の2種類の方法があります。
- 飛行時間(Time of flight)法(パルス光投影法)
光パルスを投影し、対象物で反射して帰ってくるまでの時間を計測し、計測された光の飛行時間から対象物までの距離を求める方法です。対象物までの距離は、光速(大気中で約30万km/秒)に往復の飛行時間を掛けた値の1/2として求められます。
この方法は、2点間の距離を計測する代表的な手法としてよく利用されていますが、光の飛行速度が高速であるため、光の往復時間の計測精度の制約により、一般に距離の計測精度を1cm以下にすることは困難です。 - 位相差法(変調光投影法)
光の強度を正弦波状に変調した光ビームを投影し、対象物からの反射波と元の波との位相差を計測することによって、対象物までの距離を求める方法です。図2に示すように、計測される位相差(ラジアン)をδとし、計測に使用する変調光の波長をλ、波数(整数)をnとすると、2点間の距離dは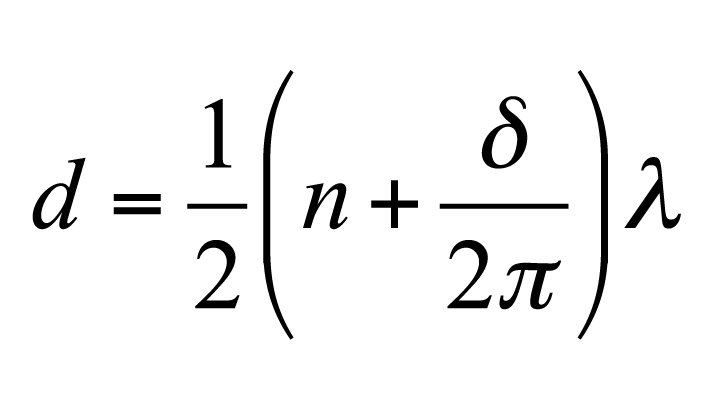 で求められます。
で求められます。
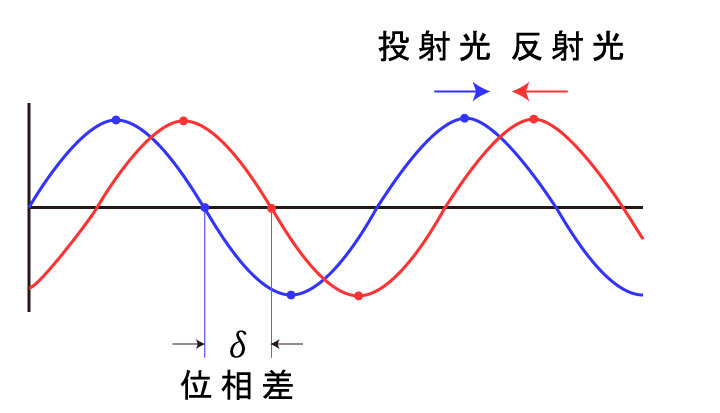 図2 位相差法
図2 位相差法
この方法は、飛行時間法よりも高精度の測定結果(計測誤差で2~5mm程度)が得られますが、位相差を検出できるだけの反射光が必要となるため、観測条件の制約が増えます。
どちらの方法でも、投射光で対象物を走査することにより、対象物の形状を計測することができます。光レーダ法を用いて対象物の形状を計測する装置がレーザスキャナです。
(2015年11月18日 初稿)